红外解决方案公司,福禄克公司开发了一种新的红外技术,称为雷竞技appIR-Fusion™,在单个显示器上混合像素,可视和红外图像。这篇文章描述了正在申请专利的,新颖的,低成本的方法来解决组合图像的视差问题,从分开的可见和红外光学。

背景
可见光图像通常比红外图像更清晰有很多原因。一是可见的传感器阵列可以用更小的探测器元件和更大数量的元件制成。另一个原因是,由于可见光图像不用于测量温度,因此只能用反射辐射生成图像,而反射辐射通常会产生比发射辐射更清晰的图像。
可见探测器阵列有数百万个元素,而红外探测器阵列的元素要少得多。Fluk雷竞技appe FlexCam有一个由1360,000个探测器元件组成的可见光阵列和一个由1/18(76,800个元件)组成的红外阵列。结果可见图像比红外图像有更多的细节。此外,可见光图像可以显示与人眼看到的相同的颜色、阴影和强度,因此它们的结构和特征比红外图像更容易解释。
尽管红外和可见光摄像机可以记录目标发射和反射的辐射,但可见光图像几乎总是由反射的可见光产生。相比之下,用于测量温度的红外图像必须记录发射的红外辐射。反射的可见辐射可以产生锐利的边缘和强度差异的强烈对比;例如,一条细白线可以挨着一条细黑线。
通过将低发射率(高红外反射率)的表面与高发射率(低红外反射率)的表面相邻,也有可能具有锐利的红外反射对比度。但是相邻的表面有明显的温差是不寻常的。近距离物体之间的热传递可以通过产生温度梯度来消除温度差,这使得很难产生具有锐利边缘的发射辐射图像。这也是为什么用于测量温度的红外图像通常不如可见光图像清晰的另一个原因。
工业界需要一种能够捕捉可见图像细节和红外图像温度测量图像的相机。大多数操作人员拍摄了重复的图像,一个是可见光图像,一个是红外图像,但相互关联有时是不可靠的。真正需要的是两个图像自动叠加在一起。
其中一个建议是将可见光和红外摄像机并排组合在一个仪器中,这样两种图像就可以同时拍摄,但空间相关性受到视差的影响。它在视差可以忽略不计的远距离上工作得很好。但在预测维护和建筑科学等应用中,摄像头在中短距离使用,视差是一个问题。
红外仅可见仅50/50混合

混合可见光和红外图像
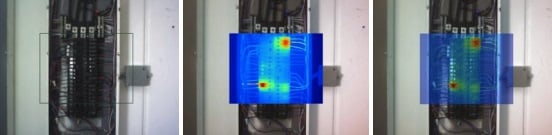
IR-Fusion技术将视频速率红外摄像机和视频速率可见光摄像机结合到一个仪器中,这样就可以在可见光和红外辐射下观看和记录场景。可视图像被自动配准(视差校正)并调整大小以匹配红外图像,因此红外场景和可视场景可以在摄像机显示上相互叠加。操作者可以选择单独查看可见图像,单独查看红外图像,或两者的混合(融合)组合。参见图1.
由于红外和可见光图像是由摄像机逐个像素匹配的,操作者可以通过注意特征在混合图像中的位置来轻松识别目标上的红外兴趣点的位置。一旦红外图像对焦,摄像机操作员可以选择仅查看可见光图像,并从未显示但与匹配红外图像相关联的数据读取可见图像上的红外温度。的仅可见面板中可以看到这样的示例图1其中最热的地方为121.7华氏度。
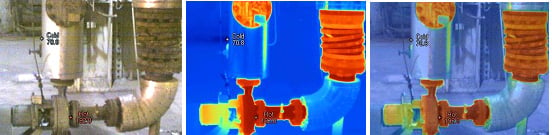
使用混合图像,即使红外对比度很低,红外图像中几乎没有结构,也可以精确地识别感兴趣的红外特征的位置。在图2,通过在混合可见光/红外图像中看到一个小的可见瑕疵或标记,就可以帮助确定平面墙壁或天花板上绝缘不良点的确切位置。
显示模式
雷竞技app带IR-Fusion™的Fluke Ti4X和5X红外摄像机可以在五种显示模式下运行;1)图片中的图片,2)全屏和3)颜色报警,4)Alpha混合,和5)全可见光。在前四种模式中的任何一种中,温度都被记录下来,并可以显示在图像的红外部分中。
混合

可见光只有红外只有适度混合
75% IR混合50% IR混合25% IR混合

可见光只有红外只有50/50混合
- 画中画模式(图3);在图中图模式下,显示屏中间的四分之一是纯红外、纯可见光或两者的混合。剩下的四分之三的屏幕是可见的。在此模式下,红外图像始终显示在显示器中间的固定位置。
图4显示不同比例红外混合的混合图像。 - 全屏模式;在全屏模式下,图片中图片模式的中心四分之一会填满屏幕。与图中图模式一样,完整的显示可以是纯可视、纯红外或两者的混合。图5显示了如图4所示的红外场景的全屏图像。
- Color-Alarm模式;颜色报警模式用于突出显示感兴趣的区域,满足相机操作员设置的特定温度标准。三种设置可供选择;A)热阈值,b)冷阈值,c)绝对范围。
- 在热阈值模式下,图像中温度高于温度设置的任何像素将以红外颜色显示。
- 在冷阈值模式下,图像中任何温度低于温度设置的像素将以红外颜色显示。
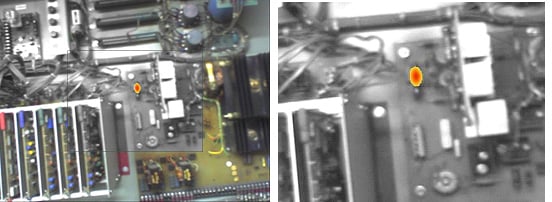
图6。颜色报警示例,热阈值设置为300°F - 在绝对范围模式(等温线)中,摄像机操作员指定一个范围的上限和下限温度。温度在此范围内的任何像素都将以红外颜色显示。在所有颜色报警模式中,颜色由红外调色板选择设置,强度由红外混合程度设置。模式显示可以设置为图片中图片或全屏显示。
如何完成混合
IR-Fusion™技术将实时可见摄像机的引擎放置在实时红外摄像机的外壳中。所述位置使所述可见光轴与所述红外光轴尽可能接近,并且在垂直平面上与所述红外轴大致平行。为了校正目标距离范围内的视差,其中一个摄像机的视场(FOV)必须大于另一个。之所以选择更大的可见视场,是因为目前可见光学比红外光学便宜,而且可见相机的分辨率要高得多。因此,通过视差校正过程丢失一些可见图像对相机和混合图像的影响最小。
图1显示了红外和可见光组合摄像机的光路和传感器配置。有两个不同的光路和两个独立的传感器;一个是可见光,一个是红外线。由于传感器的光路不同,每个传感器将从略有不同的视角“看到”目标场景,从而产生视差误差。这种视差误差通过软件调整在组合图像中进行电子校正。
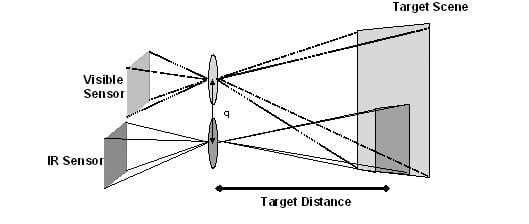
可见光学是这样的,它保持在所有可用距离的焦点。红外透镜具有较低的f值,因此具有较浅的景深,这为确定目标距离提供了极好的手段。只有红外镜头需要对不同距离的目标进行对焦调整。
视差校正
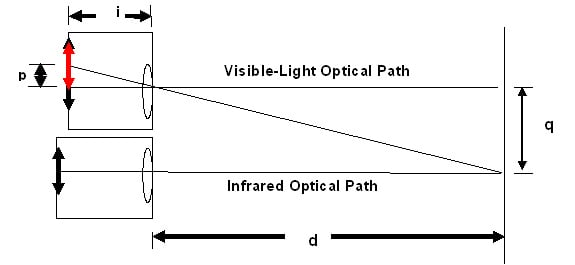
视差校正是基于红外聚焦距离。图2从几何上展示了视差方程的推导过程。
从标准透镜方程
在那里;D =到物体的距离
I =到图像的距离
F =透镜的有效焦距
从图2:
在那里;Q =可见光轴与红外光轴的分离距离p =可见焦平面上的图像偏移量
对于一个给定的相机,分离距离问以及镜头焦距f是固定的。因此,从上面的方程可见图像偏移是一个函数的目标距离。q d红外光路p i d可见光光路
当捕获图像时,完整的可视图像和完整的红外图像以及所有辅助数据都保存在相机存储卡上的图像文件中。拍摄图像时未显示的位于显示尺寸之外的可见图像的那部分保存为可见图像的一部分。之后,如果需要在PC上对红外图像和可见光图像的配准进行后期处理调整,则可以使用完整的可见光图像进行调整。
结论
一种解决可见光和红外光学相机视差问题的新方法已经产生了一种商业相机,它显著提高了预测维护和建筑科学应用的性能和实用性。具体来说,它极大地改善了红外图像的空间细节,并有助于识别红外感兴趣点的确切位置。
鸣谢
作者罗杰·施密特希望感谢红外解决方案公司的出色工作。工程团队发明和开发这款独特的相机。该团队由柯克·约翰逊和汤姆·麦克马纳斯领导,并得到彼得·伯格斯特罗姆、布莱恩·伯纳尔德、皮埃尔·查普特、李·坎特、迈克·劳库萨、科里·帕卡德、蒂姆·普雷布尔、尤金·斯科波夫、贾斯汀·谢尔德、埃德·希德和迈克·索尔森的支持。作者还希望感谢Tony Tallman为PC软件所做的工作,这使得在论文中很容易提供这些揭示性的图像。